
Condições evolutivas para o surgimento de comunicação em robôs
Resumo
O estudo da evolução de comportamentos complexos em seres vivos é difícil pois os processos evolutivos demoram várias gerações para ocorrer, e, também, porque não podemos observar comportamentos similares em seres vivos que têm gerações curtas, como as bactérias. O presente estudo contorna esta dificuldade utilizando simulações computacionais e um sistema de hereditariedade de comportamentos em robôs, a fim de compreender a evolução da comunicação complexa dos seres vivos. Entre os resultados, destaca-se que comportamentos de cooperação e de altruísmo podem surgir espontaneamente, desde que as pressões seletivas favoreçam estes comportamentos ao longo das gerações.
Introdução
Em sociedades grandes e complexas, tais quais as de humanos ou de insetos sociais, a comunicação não é só uma característica proeminente, mas também é um elemento chave no sucesso ecológico dessas espécies. Através de sistemas intrincados de comunicação, indivíduos modulam seu comportamento em resposta a numerosos sinais sociais. Os processos neurofisiológicos pelos quais um sinal é produzido, conduzido, percebido e interpretado são bem compreendidos pela ciência. Entretanto, as condições e caminhos evolutivos pelos quais um sistema de comunicação confiável se estabelece continuam largamente desconhecidos. Este é um problema desafiador porque uma comunicação eficiente depende de uma estreita coevolução entre o sinal emitido e a resposta evocada.
Para compreender a evolução desses sistemas, um método poderoso seria conduzir experimentos evolutivos com espécies que se organizam socialmente; entretanto, tais espécies têm gerações muito longas e são difíceis demais de reproduzir-se em laboratório, o que impede tal tipo de estudo. Para contornar esse problema, neste trabalho foi estabelecido um sistema experimental onde colônias de robôs podem forragear em um ambiente com fontes de comida e veneno, ambas emitindo luz vermelha e sendo distinguíveis apenas a curta distância (Figura 1; ver “Material & Métodos”). Em tais circunstâncias, a eficiência do forrageio pode ser aumentada se os robôs transmitirem informações que adquirirem sobre a localização da comida ou do veneno.
Por outro lado, tal comunicação pode ser custosa para o indivíduo, pois ela pode aumentar a densidade de robôs, aumentando a competição pela fonte de alimento (por exemplo, dez robôs podem competir por uma fonte de alimentos que apenas oito podem alcançar simultaneamente, de modo que os robôs empurram uns aos outros e competem pela fonte). Desta forma, sinalizar uma fonte de alimento pode ser benéfico para a colônia, mas custoso para o indivíduo que sinaliza; uma condição que simula situações naturais onde a comunicação é quase sempre custosa em termos de produção do sinal ou aumento de competição por recursos.
Material & Métodos
O comportamento e a performance de 100 colônias de 10 robôs foram estudados em experimentos de seleção por mais de 500 gerações, utilizando simulações de computador, modelando precisamente as propriedades dinâmicas dos robôs reais. As especificações dos controles neurais dos robôs, que processam informações sensoriais e geram ação motora, foram codificadas em genomas artificiais. A cada geração, os genomas dos robôs foram submetidos a mutação, reprodução sexuada e recombinação. Ao final do experimento, os genomas foram implementados em robôs reais, que mostraram o mesmo comportamento daqueles na simulação, demonstrando que as simulações computacionais são confiáveis em reproduzir o comportamento dos robôs.
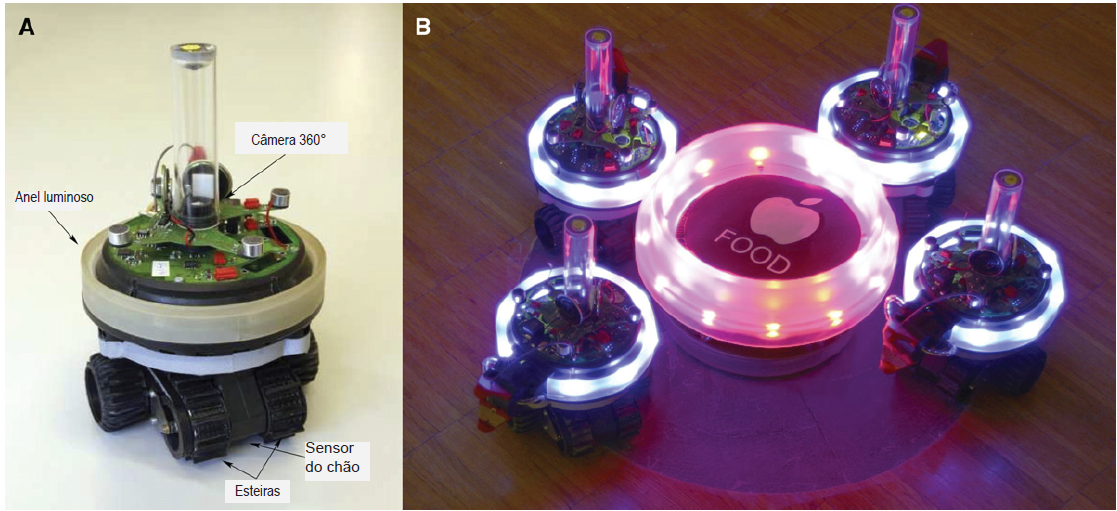 Figura 1: A) O robô usado nos experimentos; B) Robôs emitindo luz azul em torno de uma fonte de alimento que emite luz vermelha. Imagem: modificada de Floreano et al. 2007
Figura 1: A) O robô usado nos experimentos; B) Robôs emitindo luz azul em torno de uma fonte de alimento que emite luz vermelha. Imagem: modificada de Floreano et al. 2007
Para estudar o porquê de os membros de uma colônia transmitirem informações, sendo esta uma ação custosa, é necessário considerar a estrutura de parentesco dos grupos e o nível em que se dá a seleção. Para isso, foram escolhidas duas estruturas de parentesco (parentesco alto ou baixo) e dois níveis de seleção (individual ou de colônia). Na seleção em nível individual, o genoma dos 200 robôs (20%) com maior performance foram selecionados para formar a próxima geração, enquanto na seleção em nível de colônia, todos os robôs (200) eram escolhidos aleatoriamente dentre as colônias com maior performance (20%). Foram criadas colônias de baixo parentesco agrupando aleatoriamente dez robôs na próxima geração, e colônias de alto parentesco agrupando dez robôs com exatamente o mesmo genoma.
Haviam, portanto, quatro tratamentos: 1) Alto parentesco com seleção em colônia; 2) Baixo parentesco com seleção em colônia; 3) Alto parentesco com seleção individual; e 4) Baixo parentesco com seleção individual. Para cada um deles foram realizados 20 experimentos de seleção independentes, a fim de verificar se estratégias de comunicação diferentes poderiam emergir.
Os robôs podiam sinalizar a comida ou o veneno produzindo uma luz azul (que não gerava custo) que podia ser detectada pelos outros robôs. Para cada tratamento, foi determinado se a comunicação evoluiu e quantificado o benefício dela, comparando com grupos controles onde a evolução de comunicação foi impedida pela desativação das luzes azuis. Em todos os experimentos, a primeira geração tinha genoma gerados aleatoriamente, sem nenhuma informação de como se mover ou identificar fontes de comida ou veneno.
Os robôs se moviam sobre duas esteiras capazes de girar independentemente. Possuíam um anel luminoso em toda sua volta, capaz de emitir a luz azul, bem como um sensor de luz de 360 graus, que distinguia luzes vermelhas e azuis. Sob a fonte de comida havia um papel branco, e sob a fonte de veneno um papel preto; estes só podiam ser detectados por sensores infravermelhos localizados embaixo dos robôs, entre as esteiras (Figura 1). A cada 50 ms sobre o papel branco um robô recebia um ponto de performance, e a cada 50 ms sobre o papel branco, um robô perdia um ponto de performance. A performance de cada robô era a média de dez repetições do experimento, e a performance de uma colônia era a média de todos os seus robôs.
Resultados & Discussão
A possibilidade de evoluir comunicação foi vantajosa para todos os tratamentos exceto um: baixo parentesco, seleção a nível de indivíduo (Figura 2). Neste caso, uma sinalização enganosa evoluiu, onde robôs emitiam luz azul estando longe da fonte de alimento. Ao contrário do esperado, neste cenário os robôs também eram atraídos pela luz azul em 17 das 20 repetições do experimento (Figura 3). Uma possível explicação para este fenômeno é que, em estágios iniciais da seleção, robôs produziam luz azul aleatoriamente. Como eles tendem a se aglomerar em torno da fonte de alimento, isso pode ter sido o bastante para selecionar robôs atraídos pela luz azul.
De fato, em um outro conjunto de experimentos em que os robôs eram forçados a sempre emitir luzes azuis aleatoriamente, o comportamento de atração por esta luz também evoluiu. A emissão de luz longe da fonte de alimento deve ter evoluído posteriormente, de forma a diminuir a competição em torno do alimento. Consistente com essa explicação, notou-se que a atração pela luz azul, nestes casos, diminuiu ao longo das últimas 200 gerações.
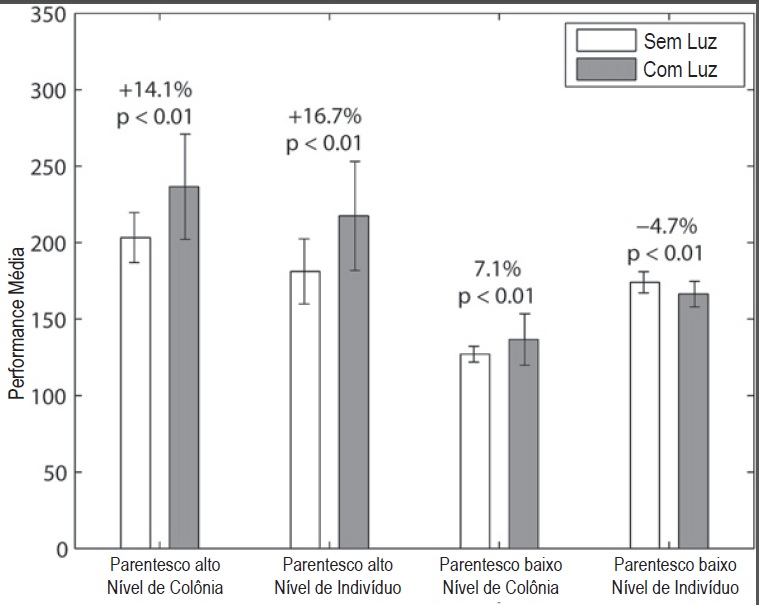 Figura 2: Médias das performances dos robôs durante as últimas 50 gerações para cada tratamento quando robôs podiam produzir luz vs. não podiam produzir luz (20 repetições por tratamento). Imagem: modificada de Floreano et al. 2007
Figura 2: Médias das performances dos robôs durante as últimas 50 gerações para cada tratamento quando robôs podiam produzir luz vs. não podiam produzir luz (20 repetições por tratamento). Imagem: modificada de Floreano et al. 2007
Este estudo demonstra a importância do parentesco na evolução da comunicação. Apesar de custosa para o indivíduo, um sistema confiável de comunicação evoluiu em três dos quatro cenários propostos. Os resultados refletem padrões observados na natureza, onde sistemas complexos de sinalização ocorrem em espécies que formam grupos aparentados, tais quais colônias de insetos sociais, por exemplo. O estudo demonstra também que sistemas de comunicação confiáveis e enganosos podem evoluir mesmo em robôs com redes neurais simples.
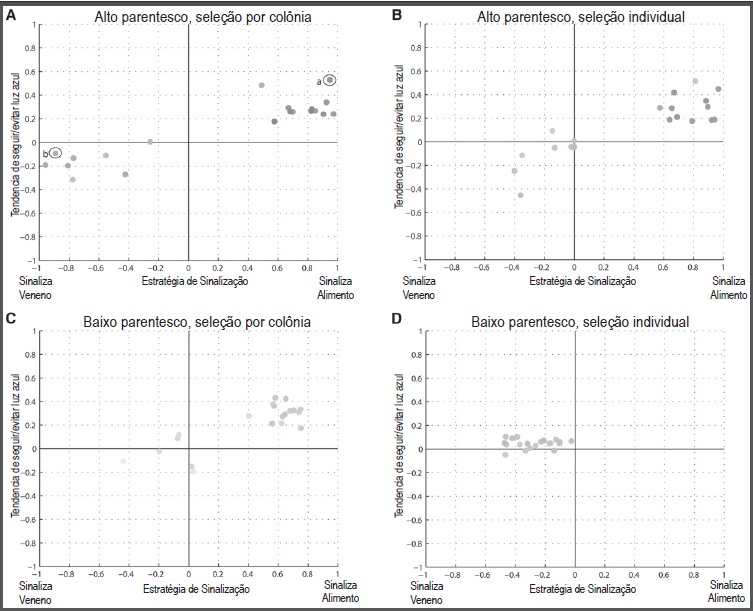 Figura 3: Relação entre estratégias de sinalização e resposta comportamentais. Cada ponto é a média para 100 colônias em uma repetição após 500 gerações sob seleção. Valores positivos para sinalização indicam tendência a sinalizar próximo ao alimento, enquanto valores negativos indicam sinalização próximo ao veneno. Valores positivos para tendência de seguir/evitar luz azul indicam uma atração pela luz azul, e valores negativos indicam aversão. Quanto mais escuro o ponto, mais alta foi a performance da colônia. Imagem: modificada de Floreano et al. 2007
Figura 3: Relação entre estratégias de sinalização e resposta comportamentais. Cada ponto é a média para 100 colônias em uma repetição após 500 gerações sob seleção. Valores positivos para sinalização indicam tendência a sinalizar próximo ao alimento, enquanto valores negativos indicam sinalização próximo ao veneno. Valores positivos para tendência de seguir/evitar luz azul indicam uma atração pela luz azul, e valores negativos indicam aversão. Quanto mais escuro o ponto, mais alta foi a performance da colônia. Imagem: modificada de Floreano et al. 2007
Os resultados mostram que uma vez que um sistema de comunicação se estabelece, ele restringe a evolução de outros sistemas potencialmente melhores, porque para isto acontecer seria necessária uma fase de transmissão onde a comunicação entre sinalizador e receptor seria perturbada. Estes dados explicam porquê sistemas sub-ótimos podem persistir em diversas espécies.
Finalmente, o estudo demonstra que princípios evolutivos que agem sobre seres vivos sociais também podem agir sobre sistemas de inteligência artificial, de modo que conhecimentos da biologia evolutiva podem ser úteis no desenvolvimento eficiente de grupos de robôs colaborativos.
Pesquisa ao seu alcance: Fernando F. Mecca
Artigo original
O texto apresentado é uma adaptação do artigo “Evolutionary Conditions for the Emergence of Communication in Robots”, publicado pela revista Current Biology, em março de 2007, de autoria de Floreano, D.; Mitri, S.; Magnenat, S. & Keller, L. O artigo original pode ser acessado em https://www.sciencedirect.com/science/article/pii/S0960982207009281
(Editoração: Gabriela Duarte, Gabriel Ferreira e Caio Oliveira)